MARIN develops a modular Autonomous Underwater Vehicle
Conference/JournalMARIN Report 127
Date13 Sep 2019
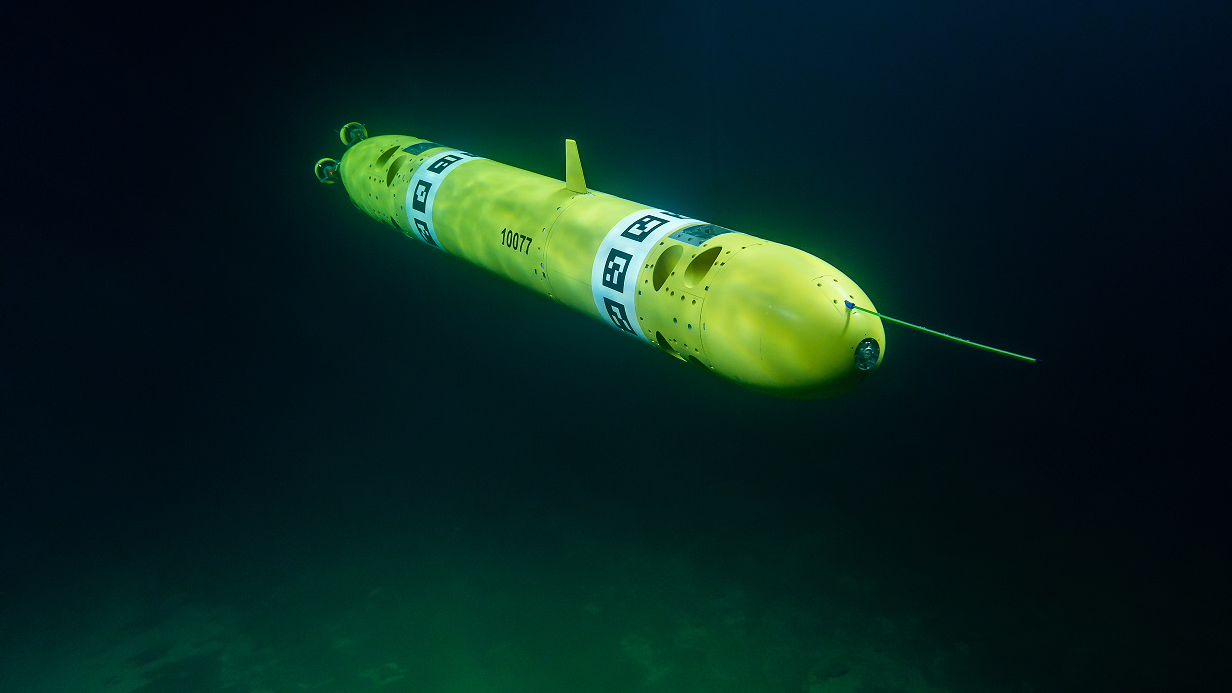
MARIN is designing and building a modular Autonomous Underwater Vehicle (mAUV) in order to gain a better understanding of the challenges involved in autonomous sailing.
MARIN's goal of building an underwater vehicle is that it will serve as a research platform on which we have control over every aspect of the system. Initially we want to examine the dynamic behaviour of a small vessel interacting with its environment and then all the aspects concerning autonomous sailing. The development of vehicle autonomy will start with simple behaviour and will be extended over time. By using the mAUV in operational scenarios we can learn what level of autonomy is desired.
MARIN's goal of building an underwater vehicle is that it will serve as a research platform on which we have control over every aspect of the system. Initially we want to examine the dynamic behaviour of a small vessel interacting with its environment and then all the aspects concerning autonomous sailing. The development of vehicle autonomy will start with simple behaviour and will be extended over time. By using the mAUV in operational scenarios we can learn what level of autonomy is desired.
Contact

Bas de Kruif
senior researcher
Egbert Ypma
senior project manager
Hans Cozijn
senior project manager
Autonomous Underwater Vehicles are successfully deployed for inspection, reconnaissance and underwater maintenance. Increased computational power and powerful algorithms allow an AUV to remain operational for prolonged times, without the constant supervision of humans. The AUV’s performance at sea is of importance to enable it to correctly complete its mission: if it does not know where it is when detecting an object, or if it cannot stay stationary during the inspection, the mission’s objective might not be achieved.
The system is designed as a test platform
Tags
marinsmart shippingcollission avoidancesituational awarenessmonitoring & control