mAUV further developed with addition of relative navigation capabilities
Conference/JournalMARIN Report 135
Date20 Apr 2023
MARIN has designed and built the modular Autonomous Underwater Vehicle (mAUV) for use in research projects in its model basins. The mAUV has a modular set-up, so that future modifications can be made without the need to construct a new vehicle each time.
In 2022, we took the next important step in its development with the addition of relative navigation capabilities. This enables accurate manoeuvring in the vicinity of objects, which is essential during launch and recovery operations for example. We implemented a method for measuring the position and attitude of the vehicle relative to a known target. Furthermore, control system developments are necessary to allow transitions between absolute (earth-fixed) position control and relative (target-fixed) position control.
In 2022, we took the next important step in its development with the addition of relative navigation capabilities. This enables accurate manoeuvring in the vicinity of objects, which is essential during launch and recovery operations for example. We implemented a method for measuring the position and attitude of the vehicle relative to a known target. Furthermore, control system developments are necessary to allow transitions between absolute (earth-fixed) position control and relative (target-fixed) position control.
Contact

Hans Cozijn
senior project manager
Future developments
The research on autonomous underwater vehicles does not end here, and we have identified several areas to explore. For example, we would like to increase the forward speed of the vehicle to improve its operating envelope. We are also keen to further develop the autonomous capabilities and increase the complexity of mAUV’s missions. And finally, the results of the present launch and recovery experiments inspired us to further enhance the performance of the relative position measurement system.
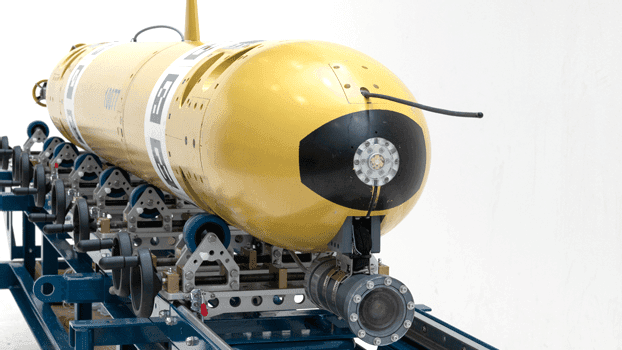
MARIN mAUV (modular Autonomous Underwater Vehicle)
The mAUV on a mission to search and inspect a sea mine! Its manoeuvres around the mine is a demonstration of the six Degrees of Freedom control capabilities of the vessel.