
Virtual mooring line tension monitoring
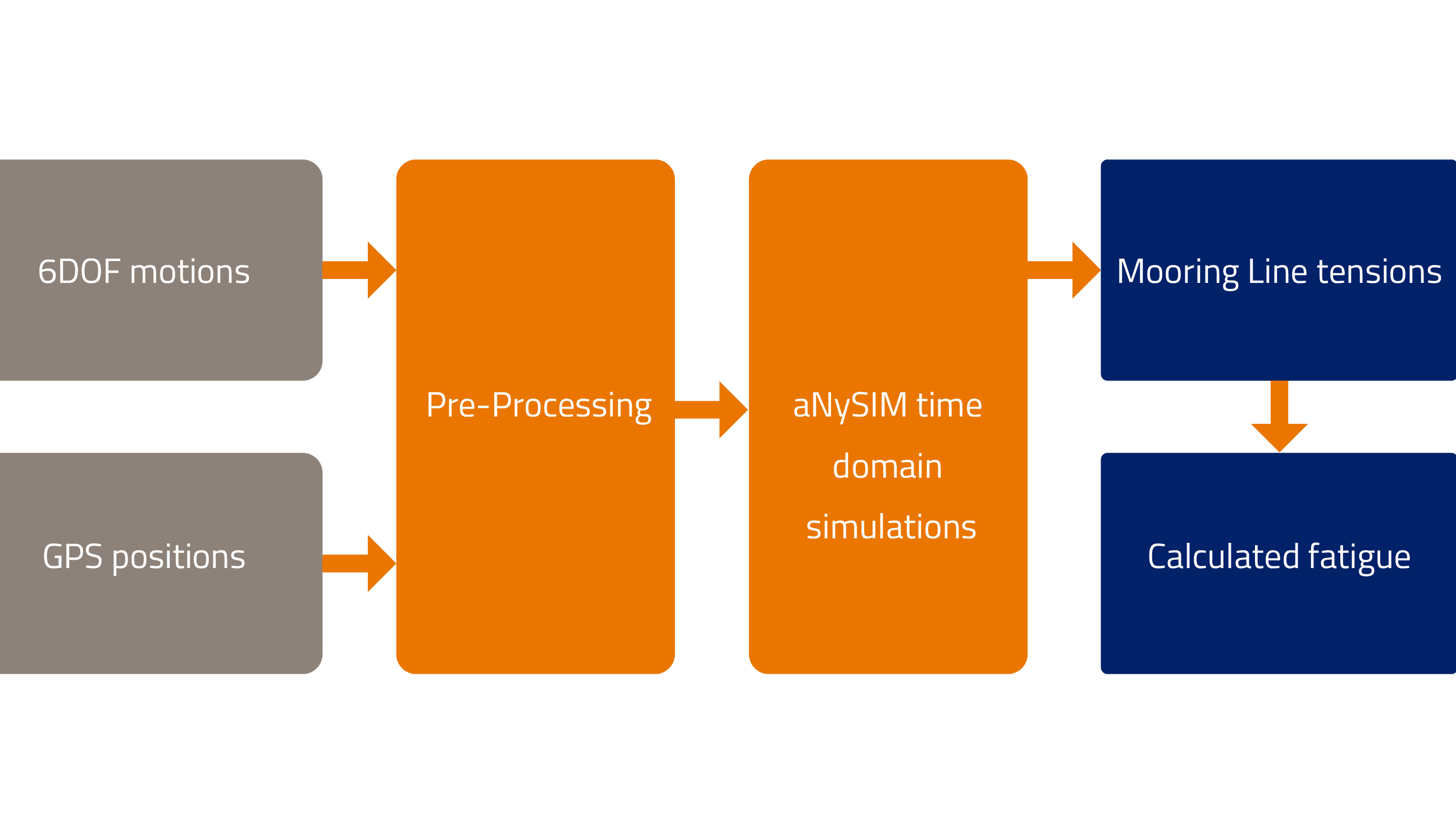
With a detailed numerical model of the FOWT mooring system, the mooring line tensions are calculated with the time domain simulation program aNySIM, using the FOWT measured wave frequency motions and the measured horizontal GPS positions in the field as input. These measurements are provided by a Motion Reference Unit (MRU) and an accurate RTK DGPS system. Using the measured response of the FOWT avoids the uncertainty resulting from a prediction of the hydrodynamic response. The time domain software, running in real time, generates the static and wave frequency mooring line tensions. This provides the operator with valuable data for the validation of the design. The associated fatigue analysis contributes to knowledge on the integrity of the mooring system.
One of the main benefits of the indirect mooring line tension monitoring system is its robustness, since all monitoring equipment is located on the FOWT (not subsea). This equipment is fully accessible and therefore maintainable and replaceable if needed.
The analysis methodology used in the indirect mooring line tension monitoring system provides an important contribution to the development and maintenance of a digital twin of a mooring system. By integrating the design model and in-field measurements, the long-term distribution of forces in the mooring lines are monitored. This generates a detailed knowledge of the status of the mooring system and provides design feedback for the future.
One of the main benefits of the indirect mooring line tension monitoring system is its robustness, since all monitoring equipment is located on the FOWT (not subsea). This equipment is fully accessible and therefore maintainable and replaceable if needed.
The analysis methodology used in the indirect mooring line tension monitoring system provides an important contribution to the development and maintenance of a digital twin of a mooring system. By integrating the design model and in-field measurements, the long-term distribution of forces in the mooring lines are monitored. This generates a detailed knowledge of the status of the mooring system and provides design feedback for the future.
Contact

Pieter Aalberts
senior project manager
Hardware of digital twin
The hardware of an in-direct mooring line tension monitoring system comprises a Motion Reference Unit (MRU), a RTK GPS and a Windows operated PC with data acquisition software. Alternatively the measurements are streamed directly to the cloud. In this case the software runs in the cloud.The MRU sensor measures the 6 DOF wave frequency FOWT rigid body motions of the FOWT. The equipment to measure the FOWT positions comprises two GPS antenna’s and one GPS receiver. The receiver receives signals from multiple devices including GPS, GLONASS, BeiDou, Galileo, SBAS / WAAS and ATLAS H10 offshore corrections (commercial service). The GNSS receiver is connected to two antenna’s to obtain, in addition to the FOWT position, the FOWT heading. With measurements of the position (at the GPS antenna location) and the heading the horizontal position at the fairleads can be determined. With ATLAS H10 offshore corrections a position accuracy at the fairleads of approximately 5 cm is obtained.