Safeguarding structural integrity with MONITAS
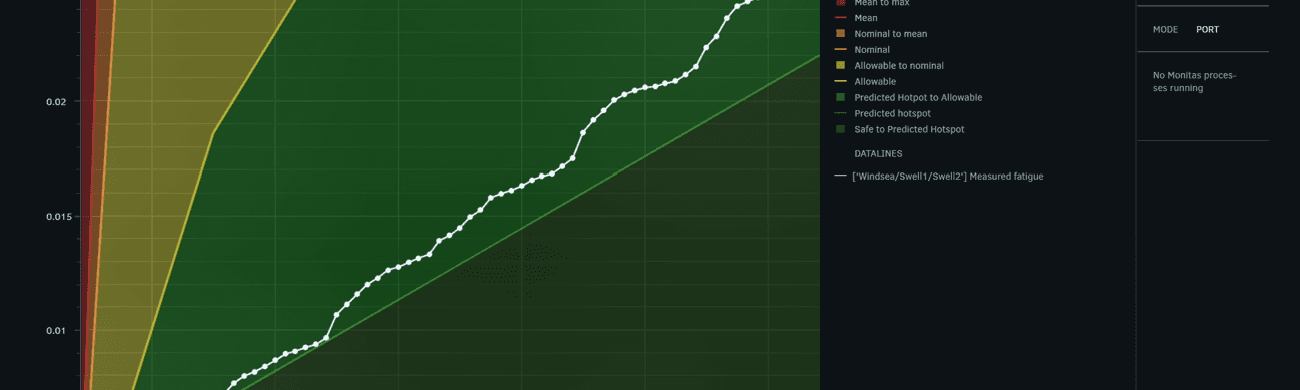
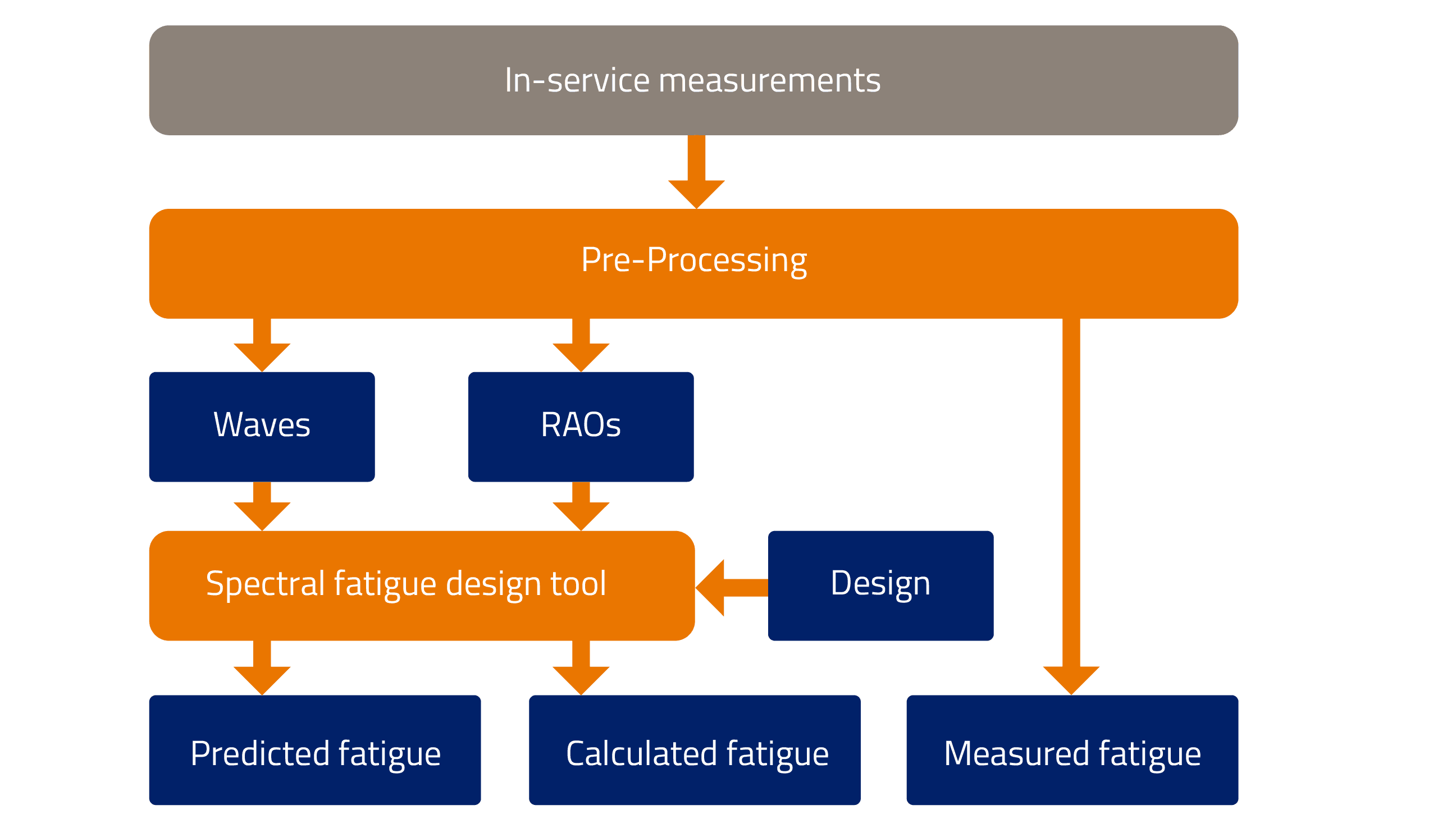
MONITAS is a dedicated software of an advanced structural monitoring system which advises the owner on the integrity of hull and moorings of offshore floaters. It helps the owner to understand the real age of the floater by monitoring fatigue loading and integration with design tools. MONITAS not only measures the fatigue by sensors on hull or moorings but also explains why the measured fatigue deviates from design predictions. Differences may originate from different conditions (environmental and loading) assumed during the design process or from simplifications in the fatigue design tool. For this reason the floater design tool is part of the MONITAS software. Prediction and tool accuracy factors define the effect of assumed conditions and tool performance on the overall lifetime. These factors provide insight in the different sources of uncertainty in the design process and thereby increasing the overall reliability.
The MONITAS software has already been successfully implemented onboard of seven production units (6 FPSO and 1 FPU) located in West Africa, the NorthSea and Australia.
The MONITAS software has already been successfully implemented onboard of seven production units (6 FPSO and 1 FPU) located in West Africa, the NorthSea and Australia.
SOFTWARE AS A SERVICE
The Monitas analysis system is currently available as a dedicated windows-based software. A new version of the software which is able to operate in the cloud or a data centre and which facilitates remote data access will be available in 2022.Contact

Pieter Aalberts
senior project manager
Hardware of a structural integrity management system
The hardware of an advanced structural monitoring system comprises a wave monitoring system, strain sensors on the hull and force sensors in the mooring legs, an anemometer, accelerometers in multiple tower cross sections and a Motion Reference Unit (MRU) on the floater. Depending on the structural detail, strain gauges or vibrating wire gauges are used to monitor the structural responses in the FOWT. After installation of the strain gauges they are fully protected with an epoxy cover to provide mechanical protection and to avoid water ingress. An alternative way of executing long term static and dynamic stress and tension measurements is by using vibrating wire gauges. These sensors allow underwater maintenance if required.A wave buoy provides in addition to the wave statistics the three dimensional wave spectra. A drawback of the buoy is the costs as it requires a boat to perform maintenance. An alternative method to measure the waves is to use a motion compensated wave elevation radar mounted on the FOWT access platform. Three radars provides in addition to the wave statistics also the wave direction.
Hindcast models rely on wave propagation models and historic wind field registrations obtained from satellite measurements. With this data, estimates for wave statistics on a global grid are provided. Hindcast models do not provide the same detail as wave monitoring systems and may have a limited accuracy in disadvantageous situations. However analyses in the multiple projects have shown that when selecting the appropriate model a good comparison between hindcast and wave measurements is obtained. Examples of hindcast models are Copernicus, WaveWatch3 and ERA5.
A Motion Reference Unit (MRU) measures the 6 DOF wave frequency rigid body motions of the FOWT. The MRU sensor from SMC uses solid state gyros and accelerometers to provide real time motion measurements with high dynamic accuracy.