
Mooring line failure identification
The LifeLine system is a mooring line failure detection system for floating production systems. The associated software is suitable for turret moored and spread moored FPSOs. GPS position and FPSO heading is the only input required by the LIFELINE system to be able to assess the mooring lines integrity. The LifeLine software runs on a dedicated Window operated PC.
A TCP/IP connection between the LifeLine PC and the onboard position monitoring system is required to obtain information of the GPS position and FPSO heading. This information is to be provided in data files, e.g. half hour data files. A RS485 interface is required between both systems which enables the LifeLine System to return information of the status of the mooring lines to the position monitoring system. By means of advanced data processing the LifeLine system provides two serial output messages containing all the necessary information regarding the mooring line integrity. FPSO specific information required by the software to assess the mooring like integrity is provided in a configuration file.
A TCP/IP connection between the LifeLine PC and the onboard position monitoring system is required to obtain information of the GPS position and FPSO heading. This information is to be provided in data files, e.g. half hour data files. A RS485 interface is required between both systems which enables the LifeLine System to return information of the status of the mooring lines to the position monitoring system. By means of advanced data processing the LifeLine system provides two serial output messages containing all the necessary information regarding the mooring line integrity. FPSO specific information required by the software to assess the mooring like integrity is provided in a configuration file.
Contact

Pieter Aalberts
senior project manager
LIFELINE USER MANUAL
As part of the LifeLine system a user manual is provided. The user manual is floater specific and contains information regarding the configuration file set up and guidelines on how to interpret the output messages.LIFELINE METHODOLOGY
The LifeLine methodology consists of two different but complementary approaches, the short-term approach (STA) and the long-term approach (LTA). The short-term approach employs an event based algorithm to assess the integrity of the mooring system. The algorithm aims to identify a mooring line failure by looking at semi-instantaneous shift in the mean position of the floater. The long-term approach employs a status based algorithm. This algorithm aims to identify a mooring line breakage by comparing the zero-environment equilibrium position of the floater pre and post potential failure. The LTA monitors and updates the equilibrium position of the floater periodically. When a failure occurs the equilibrium position will change and after a sufficient amount of time it will be detected by the LTA. This approach is characterized by a longer detection time but it is not sensitive to data quality and extreme environmental conditions.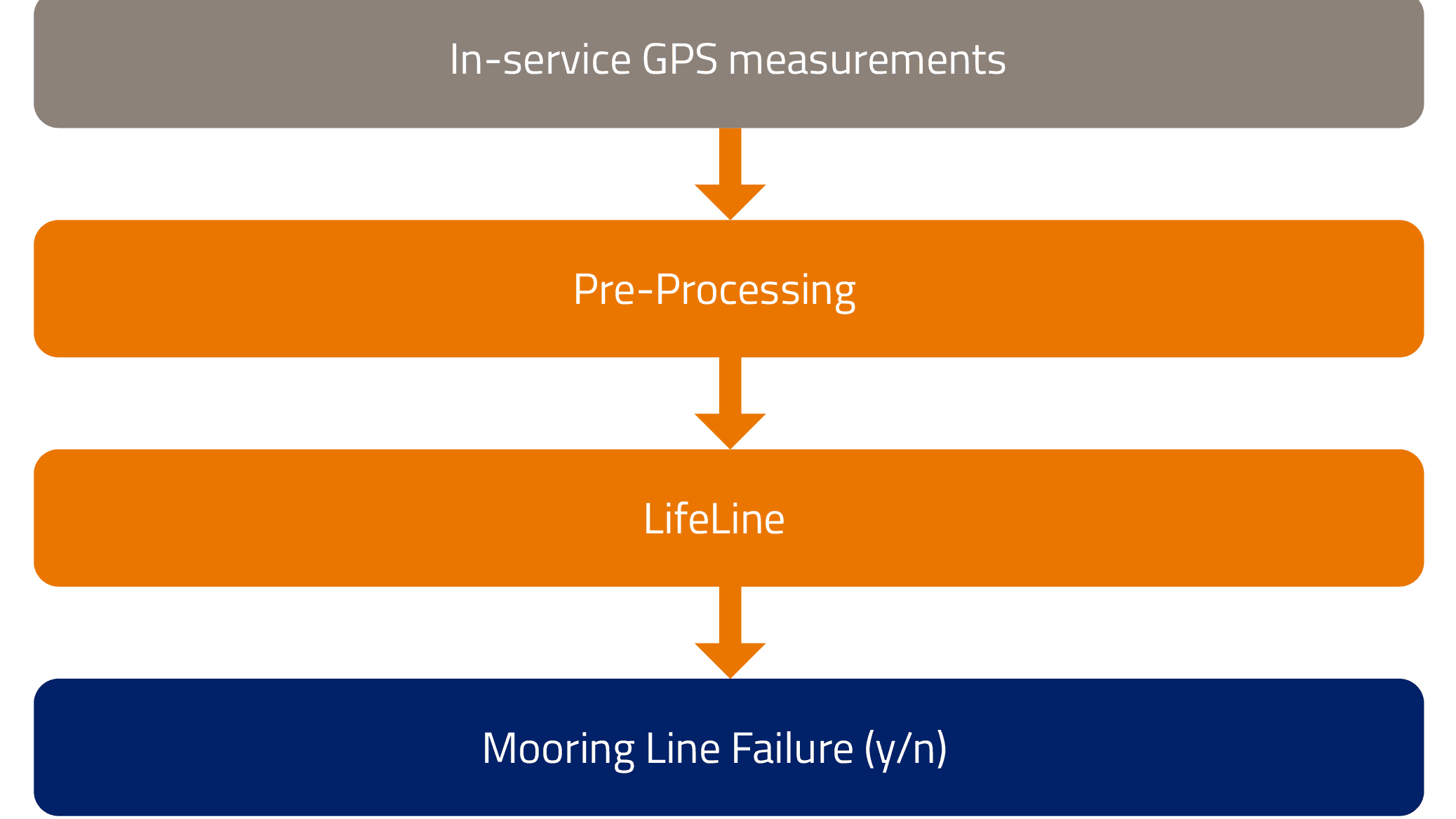
Validation and verification
The LifeLine system was validated using different tools and sources of data including numerical simulations, blind tests and in-service measurements. The validations were done for multiple floaters, both spread moored and turret moored, installed in different regions including West Africa, Australia, NorthSea, Brazil and Gulf of Mexico.Software input and output
A configuration file is used to define the floater specific input parameters which includes among others, the type of mooring system (turret or spread moored), floater natural period, maximum allowable identification time (LTA), quality threshold (STA and LTA) and minimum and maximum offset caused by a line failure.The output of the LifeLine system is returned to the customer position monitoring system by two serial NMEA messages. STA serial messages ($LFSTA) are sent every three hours whereas the LTA serial messages ($LFLTA) are returned once a day. Among others the following information is included in the messages:
• The date and time of the event detected (STA)
• The warning level for the mooring line integrity assessment (STA-LTA)
• The offset related to the event detected (STA)
• The offset related to the equilibrium position of the floater (LTA)
• The direction associated to the offset position detected (STA-LTA)
• Error code